[디지털투데이 유다정 기자] 건물 안으로 들어가면 맵은 무용지물. 코엑스만 가면 넋 놓기도 부지기수다. 사진 한 장 찍으면 내가 있는 곳을 바로 알려주고, AR(증강현실) 캐릭터가 길을 알려준다면 어떨까? 더 나아가 내가 있는 곳으로 로봇이 커피를 갖다 준다면 어떨까?
25일 네이버랩스가 서울 용산구 드래곤시티호텔에서 기자간담회를 열고 미래 청사진을 내놨다. 자체개발한 자율주행자동차와 로봇기술을 통해 만드는 에이시티(A-city)다.
머신들은 도심의 각 공간을 스스로 이동하며 연결하고, AI(인공지능)은 방대한 데이터를 분석하고 예측하며, 모든 인프라는 자동화되고, 공간 그 자체를 인터페이스로 활용해 정보와 서비스가 제공되는 A-City. 고정된 부동산이 아니라 살아 움직이는 '자동산'(auto-movables)이다.
자율주행 기술 Lv.4 도달
네이버랩스에 따르면 회사는 SAE(미국자동차공학회 기준) 레벨 4 수준의 자율주행기술 구현을 앞두고 있다. 이는 자동차가 스스로 안전한 자율주행을 할 수 있는 단계를 말한다.
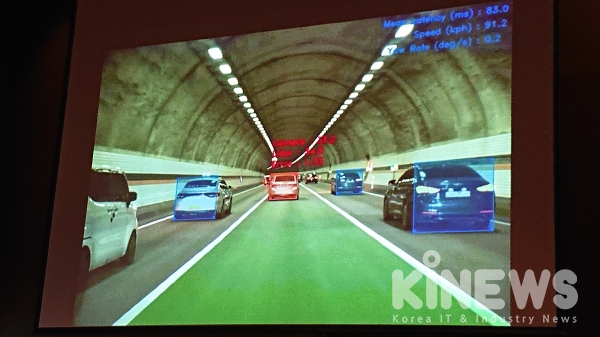
현재 네이버 자율주행기술의 오차범위는 10cm 정도다. 차량이 차선 밖으로 나가지 않는 기준이다.
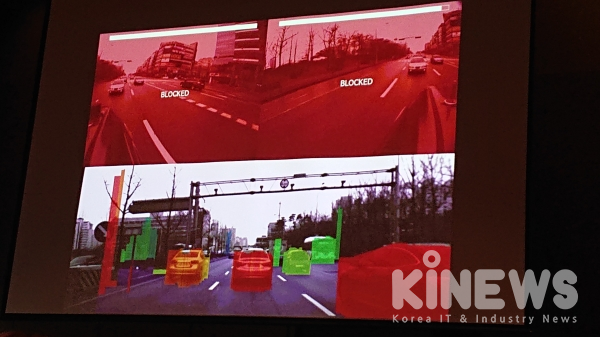
이날 네이버가 공개한 실험 영상을 보면, 어둡거나 밝은 상황, 터널에 들어갔을 때 등 여러 상황에서 도로 상황을 인지하는 것을 확인할 수 있다.
백종윤 자율주행그룹 리더는 "컬러 카메라에 딥러닝 기술을 더해 신호등을 찾고 신호를 확인한다. 화각이 다른 카메라를 이용해 크로스 체크하고 HD맵의 정보까지 더해 도심에선 거의 100%에 가까운 인식 결과를 내놓고 있다"고 부연했다.
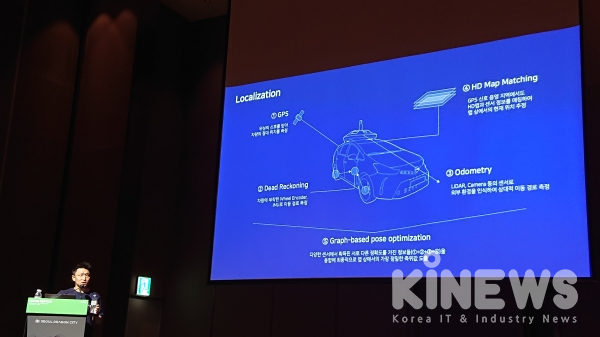
자율주행을 위해 일차적으로는 GPS, 위성의 신호를 받아 차량의 절대 위치를 측정한다. 다만 GPS는 건물에 의해 신호가 교란돼 음영지역이 생기기고 밀림현상(드리프트)이 나오기도 한다. 이를 보완하는 것이 HD Map Matching 기술이다. GPS 음영지역에서도 HD맵과 센서 정보를 매칭하여 맵 상에서의 현재 위치를 추정할 수 있다.
이와 함께 ▲Dead Reckoning(차량부착 Wheel Encoder, IMU로 이동경로 측정) ▲Odometry(LiDAR, 카메라 등 센서로 외부환경 인식) 등을 융합해 정밀한 측위값을 도출한다.
네이버는 자율주행머신의 두뇌이자 센서인 ‘HD맵’의 신속한 제작과 업데이트에 공을 들이고 있다. 이를 위해 ▲딥러닝과 비전 기술로 도로 정보를 자동 추출해 보다 신속하게 지도를 제작할 수 있는 자동화 알고리즘과 ▲시시각각 변하는 도로정보까지 신속하게 반영할 수 있는 크라우드 소스 매핑crowd-source mapping 방식의 HD맵 업데이트 솔루션 ‘ACROSS’ 연구에 집중하고 있다.
하이브리드 HD매핑 기술은 자율주행머신을 위한 고정밀 지도를 만드는 네이버랩스의 독자적인 솔루션이다. 도심 단위 대규모 지역에서 촬영한 항공사진 이미지에서 도로 면의 레이아웃 정보를 추출하고, 자체 개발된 MMS(mobile mapping system)인 R1이 수집한 데이터를 유기적으로 결합하는 방식으로 광대한 영역의 HD맵을 빠르고 정확하게 제작하는데 효과적이다.
특히 ACROSS는 도로자율주행 용 HD맵의 최신성을 유지하기 위한 크라우드 소스 매핑 (crowd-sourcing mapping) 솔루션이다. 저비용 센서로 구성된 매핑 디바이스를 다수의 라이드 셰어링(Ride Sharing) 차량에 장착해 넓은 지역에서 동시 다발적으로 도로 정보의 변화를 확인하는 방식이다. 매핑 디바이스의 센서로 수집된 이미지 데이터를 처리해 기존 HD맵에서 도로 레이아웃(차선정보, 정지선 위치, 도로마커 등)이나 3차원 정보(교통표지판, 건물, 신호등, 가로등 등)의 변화를 감지하여 업데이트하는 솔루션은 물론, 최적화된 하드웨어까지 직접 개발 중이다.
네이버랩스는 더욱 고도화된 ‘하이브리드 HD 매핑’ 솔루션을 활용해 연내 서울 시내 왕복 4차선 이상의 주요 도로 2,000km의 레이아웃 지도를 완성할 계획이다. 또한 국토교통부 임시운행 허가 차량을 추가해, 실제 도로 위 다양한 상황에서의 기술 검증을 더욱 강화한다.
백종윤 리더는 "네이버는 차량을 만드는 회사도, 차량 안에 들어가려는 회사도 아니다. 우리는 공간을 이동시키고 다양한 서비스와 정보를 이동시키는 역할을 할 것"이라며 "자체 알고리즘을 개발해 실제 데이터를 어떻게 융합하고 다양한 서비스를 만들어 내는 것이 우리만의 차별점"이라고 강조했다.
"당신이 몰랐던 불편까지 잡는다"
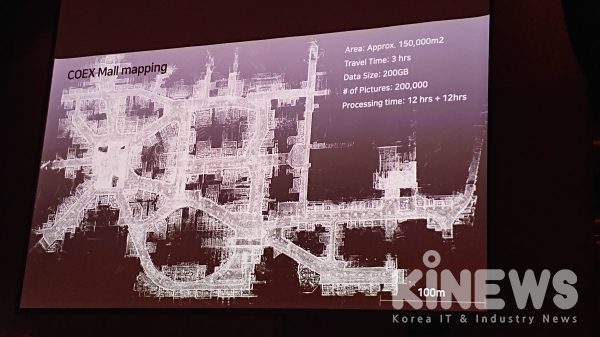
실내 위치 파악도 보다 간편해진다.
먼저 로봇 M1X가 실내 위치를 스캔해 3차원 고정밀 지도를 만든다. M1X는 M1의 업그레이드 버전으로, 1000~2000만원을 호가하는 레이저 스캐너가 빠지고 40만원 정도의 네이버 자체 제작 센서가 들어갔다. 기존 대비 제작 단가를 낮추면서도 위치 정확도가 30% 상승했다는 것이 랩스 측 설명.
이렇게 제작된 실내 지도를 기반으로 비주얼 로컬라이제이션(Visual Localization)이 가능하다. GPS가 통하지 않는 실내에서도 단 한 장의 사진만 있으면 정확한 위치를 입체적으로 파악할 수 있는 기술이다.
실내 AR 내비게이션이나 실내 자율주행 로봇에 적용된 VIO (Visual-Inertial Odometry)도 있다. 실내 이동 상황에서 센서와 영상 정보를 분석해 위치를 추적하는 기술이다. 최적화 알고리즘을 적용해 최소한의 네트워크와 저사양 카메라만으로 스마트폰에서 실시간으로 끊김없는 측위가 가능하다.
석상옥 네이버랩스 대표는 "지금 아무렇지 않게 살고 있지만 (이 기술들이 상용화되면) 불편한 과거로 기억될 것"이라며 "새로운 장소에 갈 때나 지하 주차장에서 빠르고 안정적인 길 안내가 가능하다. 더 나아가 공항에서 커피가 마시고 싶으면 카페를 찾아 캐리어를 들고 뛰는 것이 아니라 로봇이 내 위치로 커피를 갖다줄 수도 있다. 위치 인식 하나로 상상만 했던 많은 일들이 가능해질 수 있다"고 말했다.
SNS 기사보내기
관련기사
- "사용자-네이버-로봇 이어질 미래 도심 환경 준비하겠다"
- 네이버, 비전-딥러닝 컨퍼런스 'CVPR 2019'서 기술력 과시...우수인재 영입 나서
- '일관성과 뚝심' 네이버 이해진의 기지개가 준 '울림'
- 해외 여행 시 '환전 걱정' 곧 사라진다...간편결제 활성화
- '방년 20세' 새로운 네이버는 계속 변화한다
- 네이버-라인, 전세계 AI 개발자 실력 겨루는 글로벌 해커톤 연다
- SKT, 대작 게임 ‘해리포터:마법사연합’으로 5G AR 대중화 첫발
- [답사기] 온라인을 넘어 오프라인까지 미래 IT산업...스마트 디바이스 쇼 2019
- GM, "연말까지 자율주행차 공급 못 해"
- AI 인재, 지금은 부족하고 나중엔 뺏긴다
- 한국MS, 애저 데이터브릭스 서비스 국내 론칭..."MS의 AI 사용해보세요"
- [디투피플] 이경전 교수 "AI로 플랫폼 만들어 '돈'을 벌자"